Overview
This kinematic constraint keeps an objects up direction constant.
The Gryoscopic Joint works without using any Kinematic Relations
Where to find
The Gyroscopic Joint can be found under Mechanics > Add Kinematics > Gyroscopic Joint.
This will add the Gyroscopic Joint component to the currently selected object or create a new empty GameObject with the component attached if no objects are selected.
Joints must be placed as children of a Kinematics Controller in the hierarchy.
The following inspector component will be shown:
Feature layout
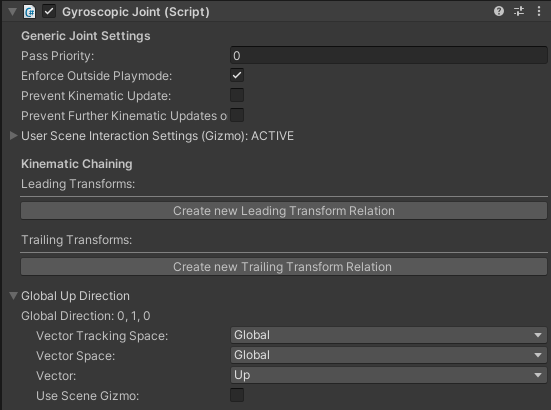
The image below shows the complete feature layout of the Gyroscopic Joint component.
Generic Joint Settings | |
Pass Priority | Priority of the kinematic chain calculations. Higher numbers are calculated earlier |
Enforce Outside Playmode | Enforces the joint to work in edit mode |
Prevent Kinematic Update | Removes the joint from the kinematic chain calculations |
Prevent Further Kinematic Update on this GameObject | Allows lower priority kinematic transforms on the same GameObject to be skipped in calculations |
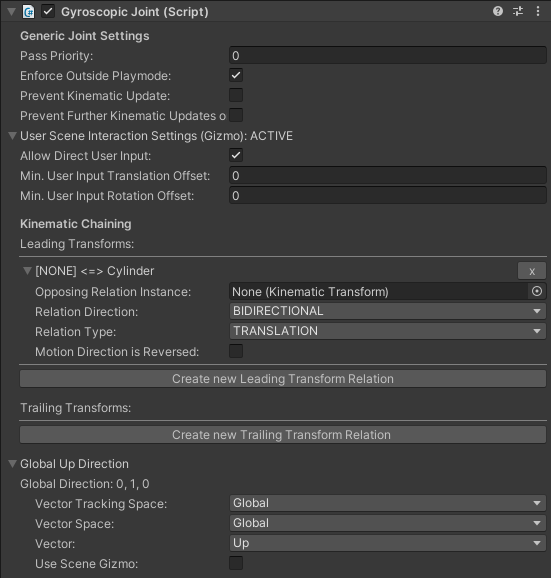
Allow Direct User Input | Allows the user to manipulate the joint with the scene gizmo |
Min. User Input Translation Offset | The minimum value the user must input before translations are applied |
Min. User Input Rotation Offset | The minimum value the user must input before rotations are applied |
Kinematic Chaining | |
Create new Leading Transform Relation | Creates a new leading relation between Transforms |
Create new Trailing Transform Relation | Creates a new trailing relation between Transforms Trailing Transforms are obsolete and will be removed in the near future |
Opposing Relation Instance | The kinematic transform you want to link the joint to |
Relation Direction | Describes the direction of the manipulation of the Transforms. The following options are available:
|
Relation Type | Used when two different sized Wheel Joints need the same rotational speed. The following options are available:
|
Motion Direction is Reversed | When enabled, the manipulation to/from the opposing kinematic transform is inverted |
Global Up Direction | |
Global Up Direction | A Scene Vector describing the up direction of the Gyroscopic Joint VectorTracking Space and Vector Space must be set to Global |
How to use
1. Add a Gyroscopic Joint to an object
2. Set the Global Up Direction to your desired value and enable Enforce Outside Playmode
3. Test if the joint is working